
1. Install latest firmware for fixed wing. V.4.3.7
2. Mission Planner 1.3.80
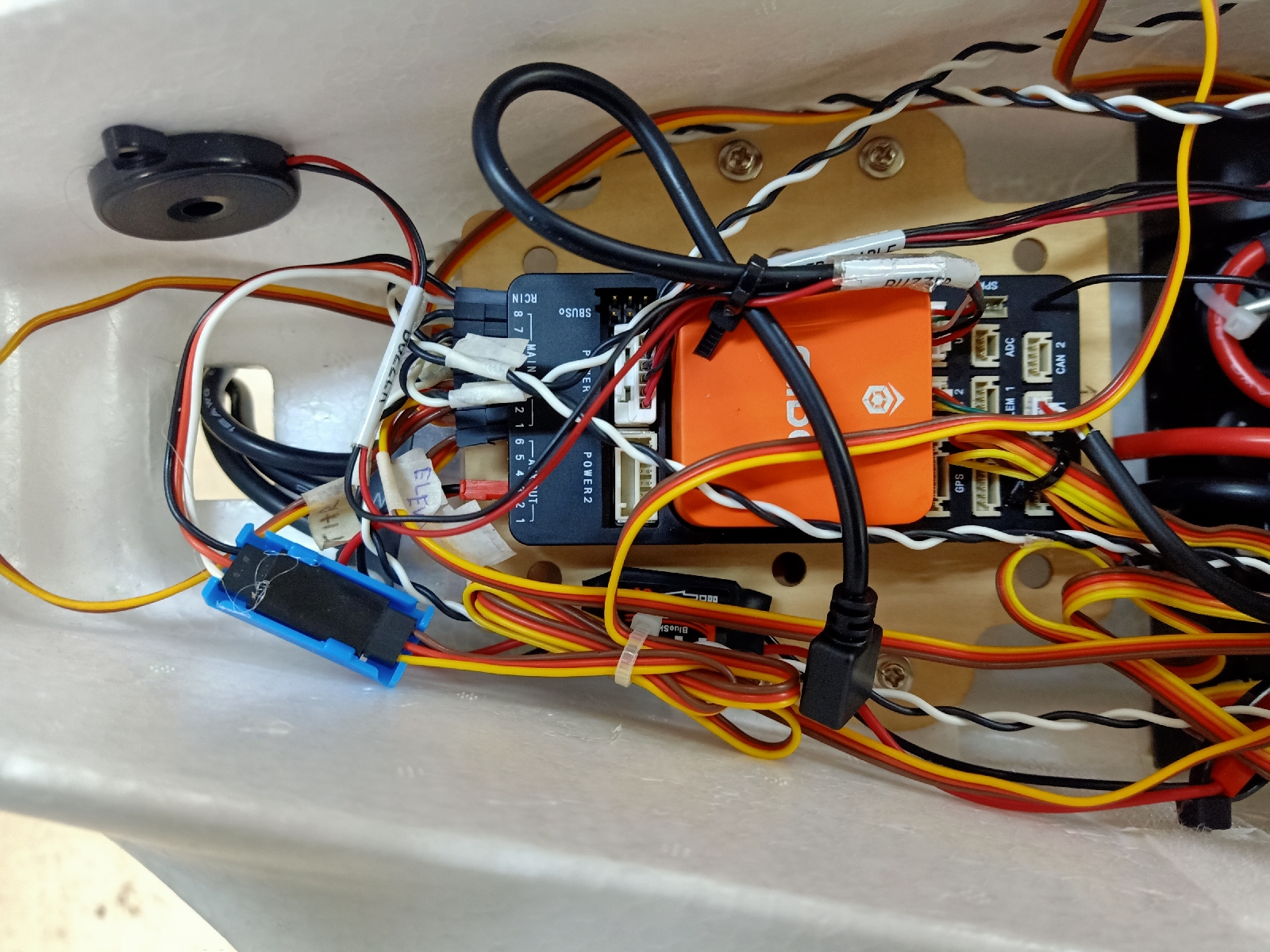
3. Pixhawk Cube orange.
4. Set Q_Enable = 1 ; Quad Vtol Enable
5. Set Q_FRAME_TYPE = 3 ; H
Connections are:
MAIN OUT 1 = aileronR
MAIN OUT 2 = aileronL
MAIN OUT 3 = Throttle
MAIN OUT 4 = Elevator
MAIN OUT 5 = M1
MAIN OUT 6 = M2
MAIN OUT 7 = M3
MAIN OUT 8 = M4
RCIN = Receiver with SBUS
Do calibration
6. Accel calibration
7. Radio Calibration
8. FLTMODE_CH =5
9. BRD_SAFETYENABLE = 0

HERE3 GPS SETUP
https://docs.cubepilot.org/user-guides/here-3/here-3-manual
CAN_D1_PROTOCOL: 1 set virtual driver of CAN1 to DRONECAN
CAN_D2_PROTOCOL: 1 set virtual driver of CAN 2 to DRONECAN
CAN_P1_DRIVER: 1 set this parameter to enable CAN 1 bus
CAN_P2_DRIVER: 1 set this parameter to enable CAN 2 bus
GPS_TYPE: 9 set the communication protal type of GPS 1 to DRONECAN
NTF_LED_TYPES: 231 Set to DRONECAN for LED type
10. ARSPD_FBW_MIN = 17
11. ARSPD_FBW_MAX = 22
12. Q_ASSIST_SPEED = 14 (minus 3 ms from min speed)
13. Q_M_PWM_MIN = 1000
14. Q_M_PWM_MAX = 1900Calibrate ESC
15. Q_ESC_CAL = 1
16. Max throttle stick
17. Connect battery
18. Reduce throttle
Check Servo output, set min same with value min of motor 1 2 3 4
19. Q_M_SPIN_ARM = 0.1
20. Q_M_SPOOL_TIME = 2
21. Q_M_SPIN_MIN = 0.15
22. Check Flight Modes (QStabilize for Multicopter mode, Manual for fixed wing)

Then test flight for qstabilize, and qloiter. Fly well, a bit of yawing, maybe of the weathervening set.
Next, control surfaces setup,
flight modes (qloiter, stabilize, qstabilize),
Radio failsafe setup,
Power failsafe setup,
Groundcontrol setup.
Then,
Vtol mode setup.
Test flight transition.
No comments:
Post a Comment