MFD Mini Crossbow Antenna Tracker.
Setup
***********************************
Right Port
Bluetooth HC-05
Bluetooth HC-05 - MFD Right Port
Tx - #1 (Right Port)
Gnd - #5 (Right Port)
5V - #1 (left Port)
Right Port Baudrate: 9600
Protocol: MAVLink
Protocol: MAVLink
*********************************
**********************************
Left Port
GPS M8N
M8N GPS - MFD Left Port
Red Wire - #1 (left Port)
Green Wire - #4 (Left Port)
Green Wire - #4 (Left Port)
Black Wire - #5 (Left Port)
Left Port Baudrate:9600
Protocol: LocalGPS
************************

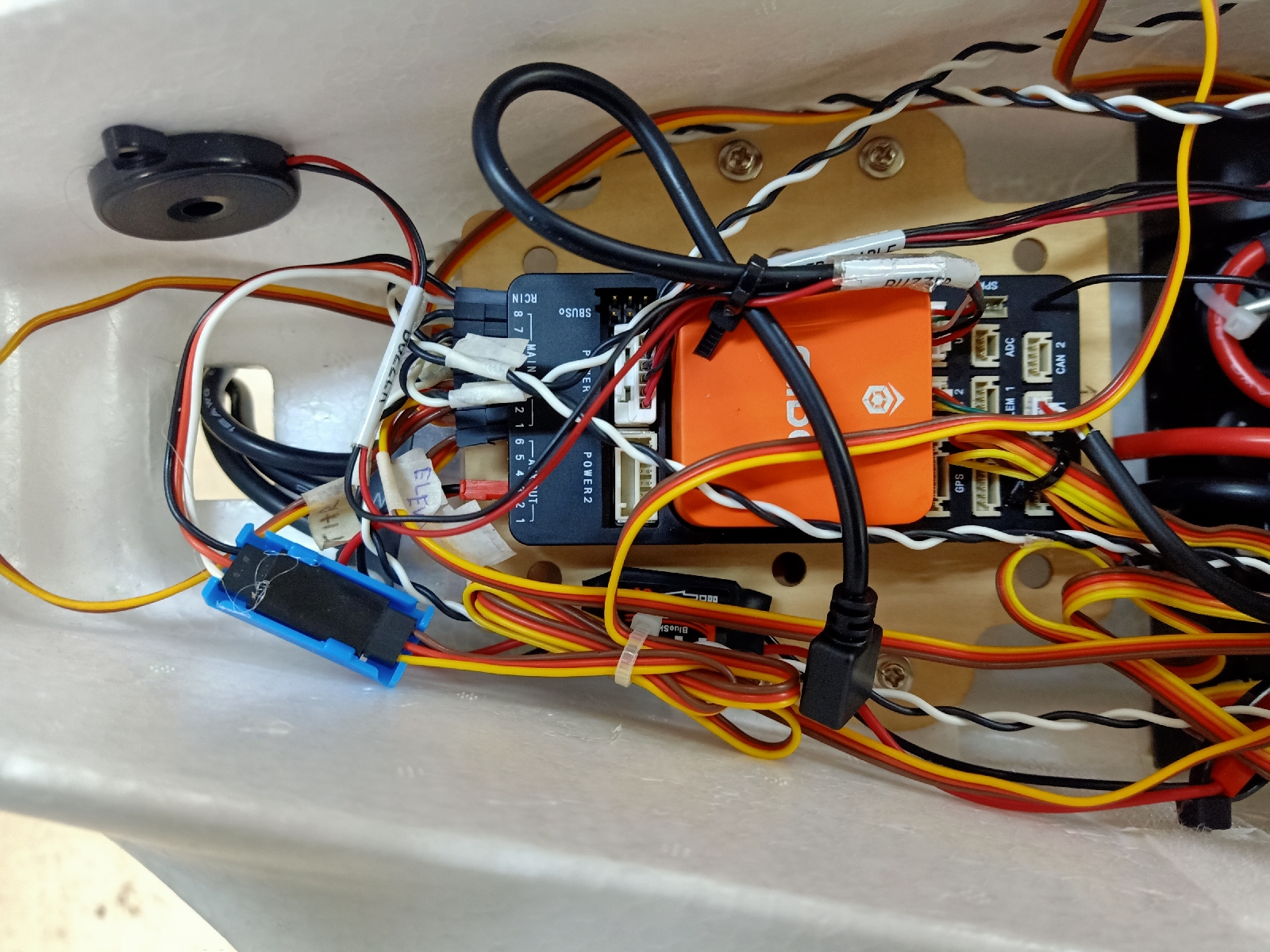
Markings for both Right and Left MFD Mini Antenna Tracker.

M8N Gps wires (Red, Green and Black)
Blue wires is coming from bluetooth module. (HC-05)
Blue wires is coming from bluetooth module. (HC-05)

GPS is mounted away and same direction with tracker.

GPS value from external shown as (L)
GPS value from aircraft without (L)

<<-- Left Port Right Port -->>
Connection from bluetooth module
OPERATION
1) Connect drone to mission planner.
2) Turn on AAT by powering up power (3S to 4S only).
3) Connect HC05 via bluetooth (Password 1234)
4) Connect with Mission planner by method below:
a) Click : Ctrl+F
b) Select Mavlink (mirror)
c) Set: COM 6 or detected port.
d) Baudrate: 9600
e) Click Connect
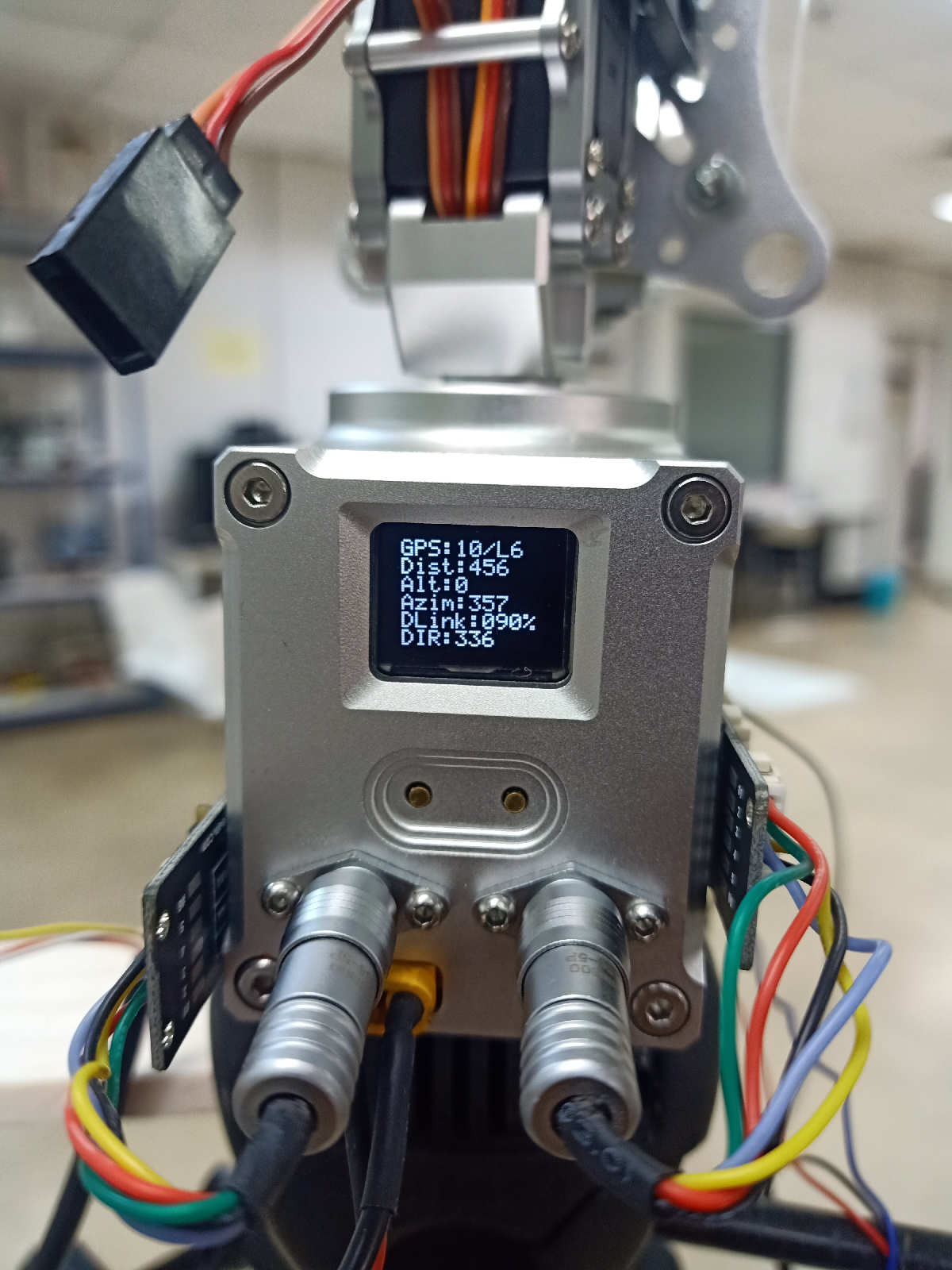
9) Check DLink in AAT Screen more than 0%.
10) Click Right Button on AAT to set HOME.
References:
2. M8N breakout